
成茂科学NARISHIGE M-44显微操作器
M-44
显微操作器
为了进一步小型化,我们使用摆动和弯曲机构创建了伪三维设计。
这是一个尽可能小型化的机械手,以便可以在显微镜载物台上安装和使用。仅进行一维粗运动的机械臂配备摆动和弯曲机构,在狭小的空间内实现伪三维驱动。这是一种连接到 ø4mm 杆的方法。
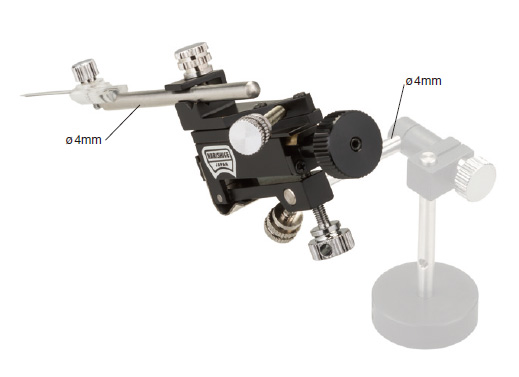
*请使用另售的磁力支架GJ-314X来安装本设备。
规格
| 配件 | 移液器支架UPN-1 扳手 | |
|---|---|---|
| 行驶距离 | 粗动 | 21毫米 |
| Y向摆动机构 Z向弓形机构 | ||
| 尺寸/质量 | 宽65×深25×高50毫米,70克 | |
系统配置图
![]() 表示主机和标准附件。
表示主机和标准附件。![]() 是可以安装的主要配件。
是可以安装的主要配件。![]() 表示安装适配器的类型。
表示安装适配器的类型。
*规格可能会更改,恕不另行通知。